%202.png?width=323&height=215&name=PH_VA_VR_Series_Technical_Support%20(1)%202.png)

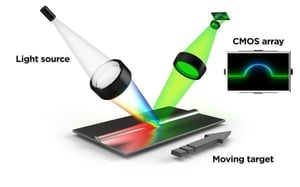
 LASER TRIANGULATION BASICS
LASER TRIANGULATION BASICS
A laser triangulation sensor projects a laser pattern from the sensor onto the surface of an object, and images the surface with a camera or receiver array. A processor determines the location of the imaged laser on the camera and calculates the distance from the sensor to the surface.
Lasers are used in triangulation sensors because they efficiently produce small, intense and precisely focused beams that reduce camera exposure times so errors due to object motion blur can effectively be eliminated.

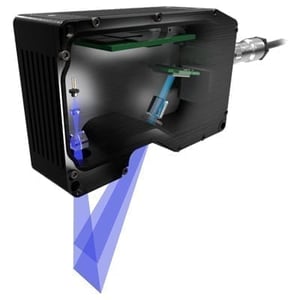
 STRUCTURED LIGHT BASICS
STRUCTURED LIGHT BASICS
Structured light (fringe projection) uses reflections of one or more light patterns projected onto the object to create a 3D point cloud of the object surface. Stereo cameras in the sensor are used to achieve the highest accuracy and sensor stability.
Blue LED illumination is used to produce high-contrast patterns that deliver high-resolution scanning with excellent ambient light immunity. LED illumination is eye safe, without the need for compliance with laser safety regulations.

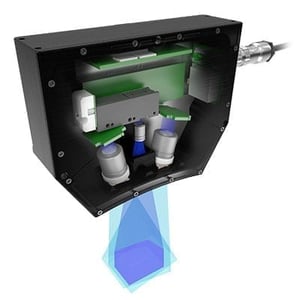
 LINE CONFOCAL IMAGING BASICS
LINE CONFOCAL IMAGING BASICS
LCI technology is based on an optical method called lateral chromatic aberration where white light emitting from a sensor’s transmitter is split into a continuous spectrum of wavelengths. Reflected wavelengths that are “in focus” (return through a pinhole) map to height variations. This technology is available in co-axial design for single and multi-point geometries, and off-axis design for line geometry.
Line Confocal Imaging technology is used for 3D topography, 3D tomography, and 2D intensity imaging in demanding applications requiring sub-micron resolution and high measurement speed.


